大阪工業大学 ロボティクス&デザイン工学部 ロボット工学科
医療ロボティクス研究室(河合研)
Medical Robotics Laboratory (Kawai Lab.)
Department of Robotics, Faculty of Robotics & Design, Osaka Institute of Technology
Research
Contents in this page (Click and Jump)
研究概要 (Summary images) 動画集 (Videos)
研究テーマ説明 (Theme) 研究背景 (Backgrounds)
目的 (Purpose) 効果 (Benefit)
- 研究概要 (Summary) -
- 動画集 (Videos) -
助手ロボットを用いたソロサージェリー斜交関節と多段伸縮ねじ機構を備える鉗子ロボット
手術助手ロボット群(内視鏡と鉗子)の切り替え遠隔操作
助手ロボットを用いたin vivo手術 (年齢制限あり)
臓器を牽引する際にできる三角形を数式処理で検出
- 研究テーマ説明 (Theme) -
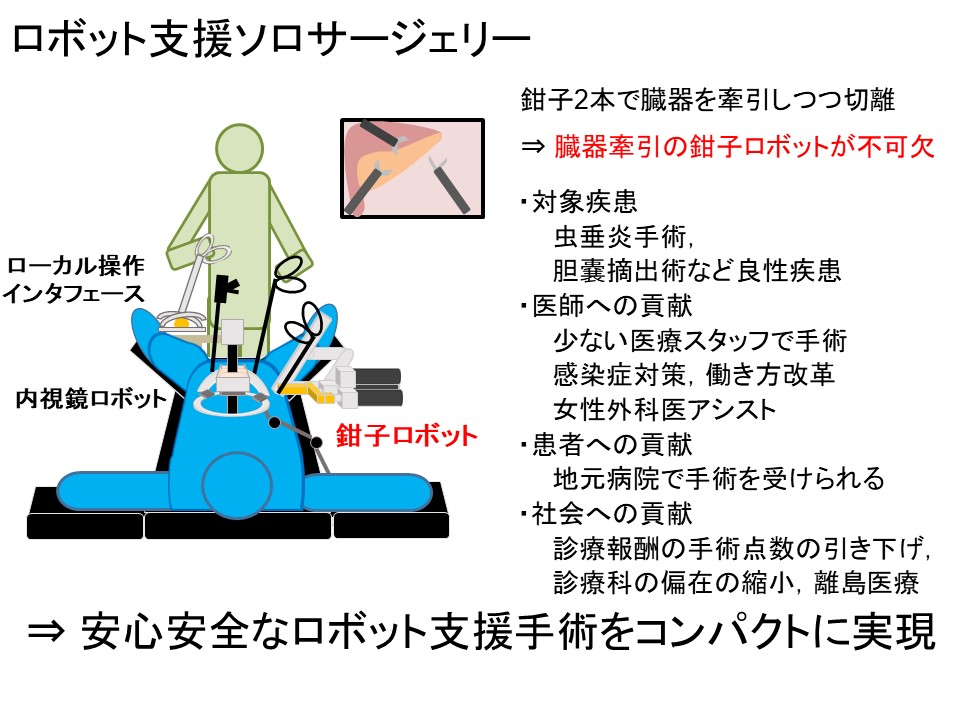
執刀医が手術を一人で行える,安全性に優れるソロサージェリー手術支援ロボットを研究しています.
人と同じ空間に存在し,共存協調して作業を行えるロボット技術の確立を目指して,
内視鏡外科手術におけるカメラと鉗子の助手をマニピュレータが担えるよう,医工・産学連携で取り組んでいます.
医師のハイエンドツールであるオールインワンシステムのリモート(遠隔)操作型ロボットに対して,
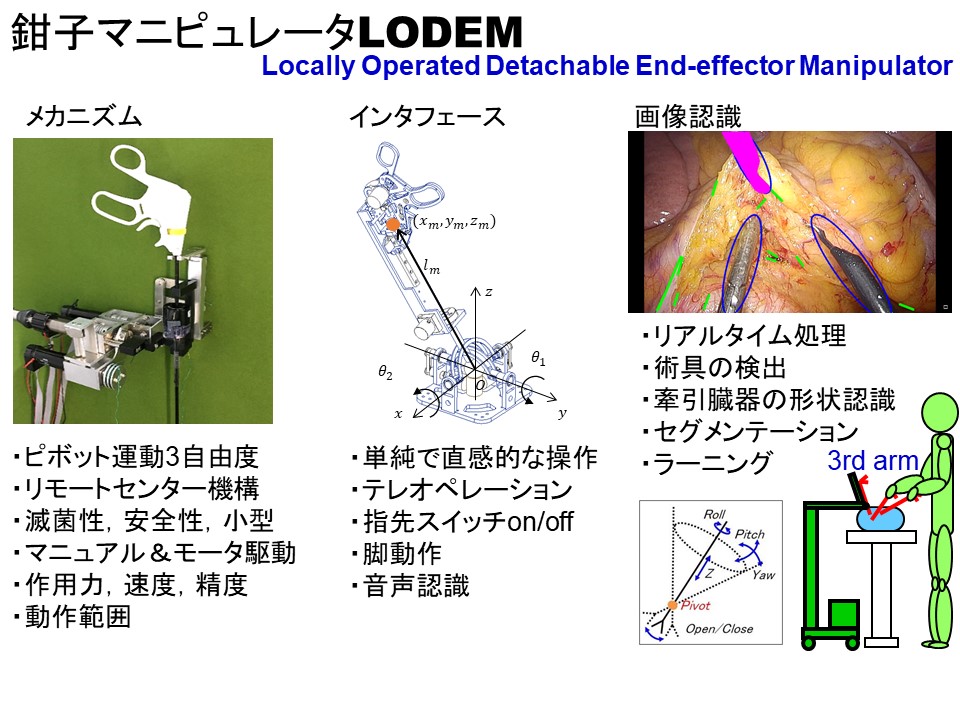
アシスタントツールであるローカル操作型ロボットLODEM(Locally Operated Detachable Endo-effector Manipulator)群は,
センシング能力に優れる人と,安定した作業に優れるロボットが補完しあう,インテグレーションです.
具体的には,下記の研究テーマがあります.
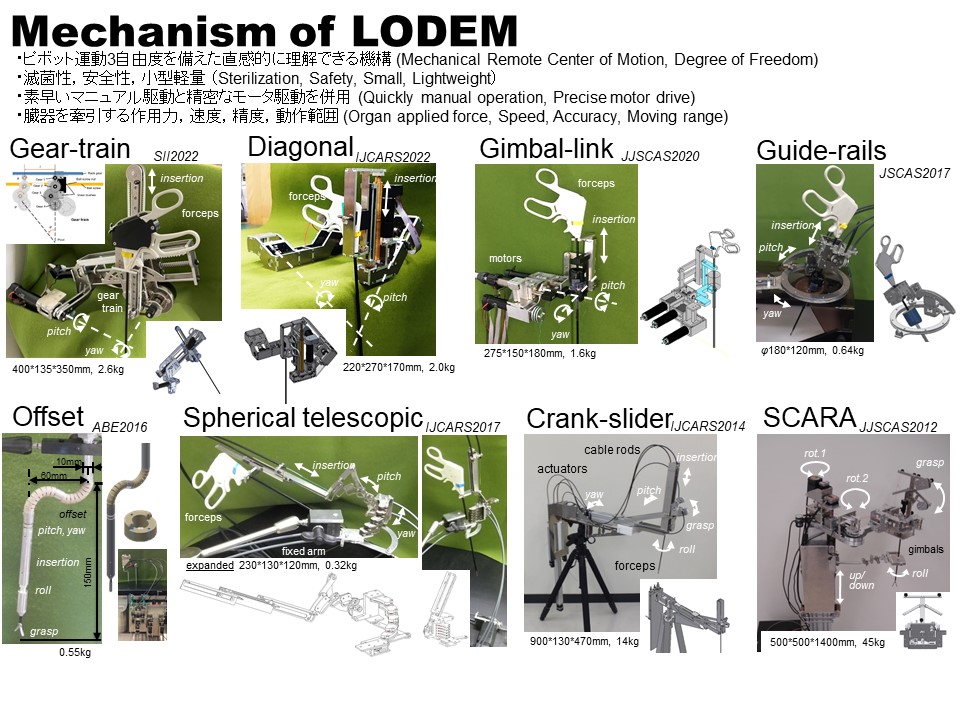
(1)小型の術具マニピュレータ
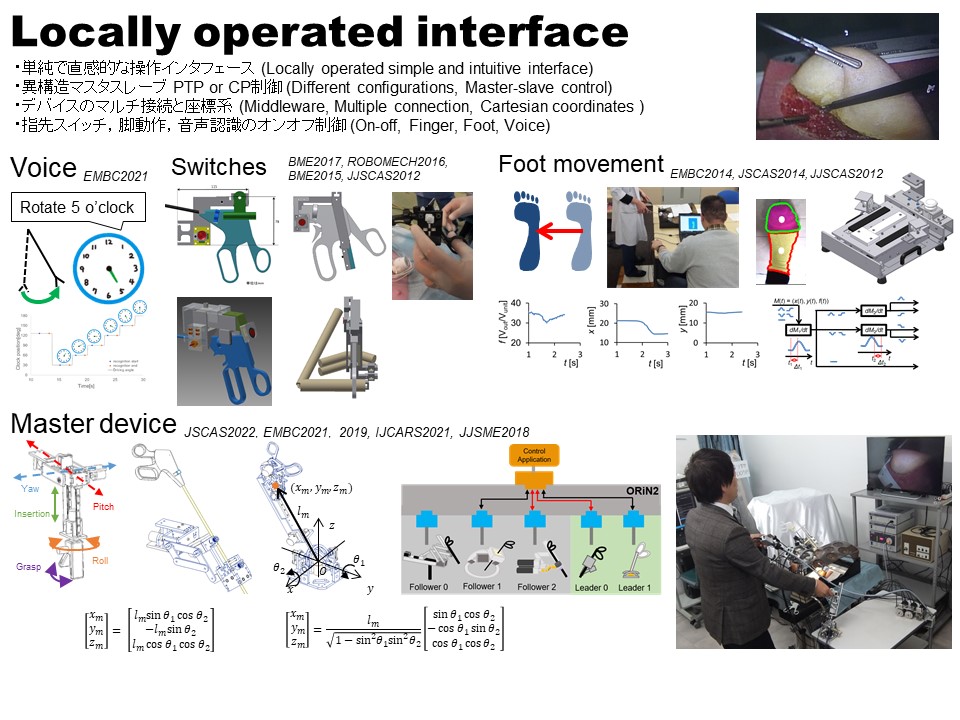
(2)ローカル操作型インタフェース
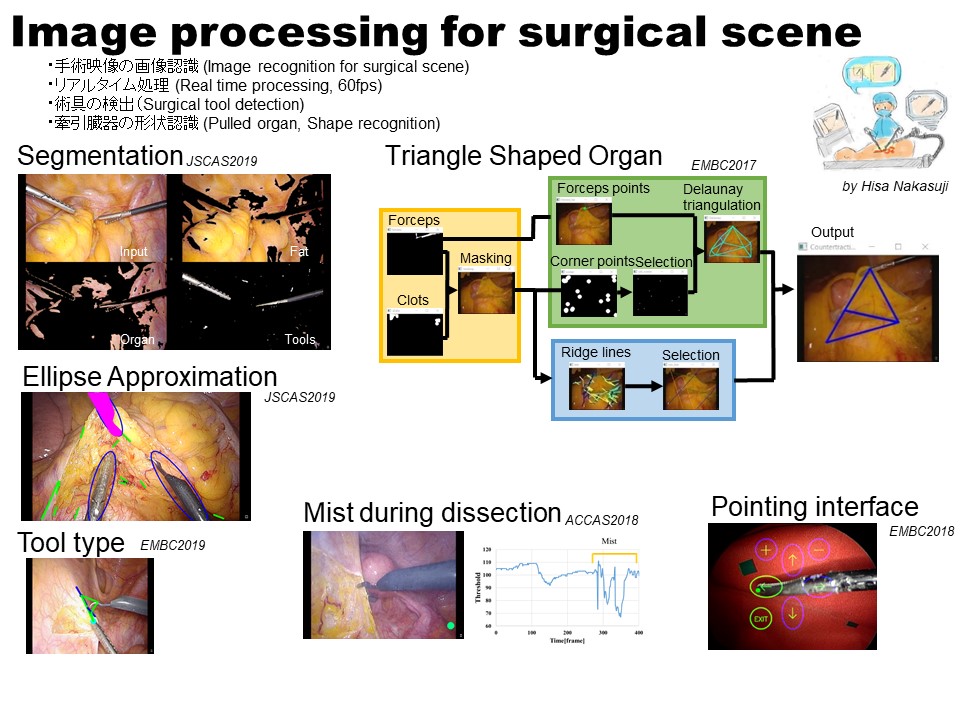
(3)内視鏡映像下での臓器形状や術具の画像認識
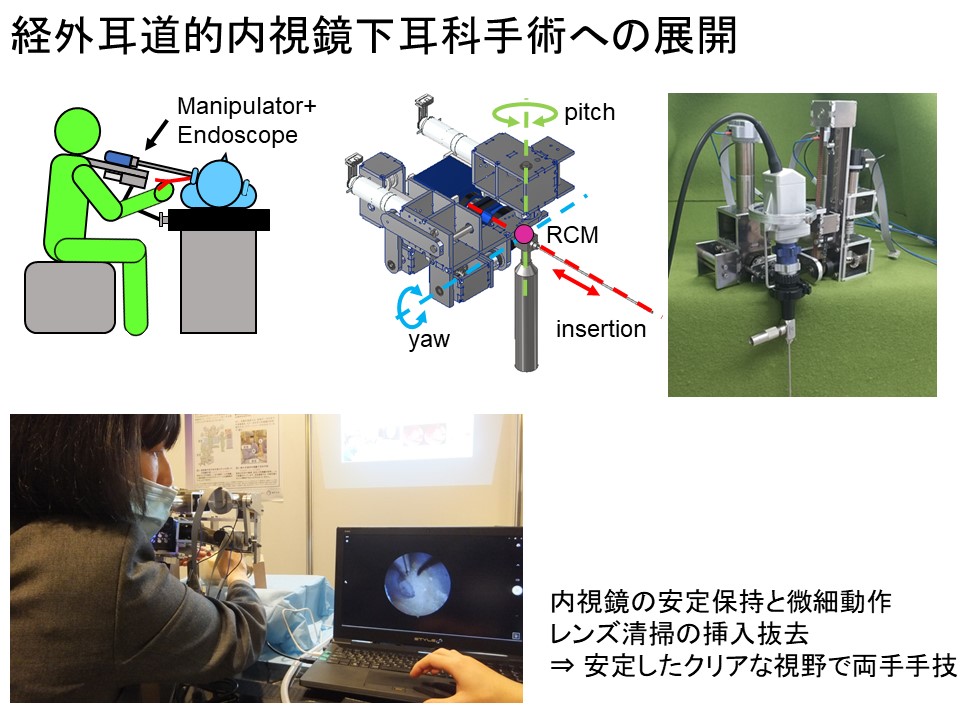
(4)経外耳道的内視鏡下耳科手術への展開
(5)臓器硬さセンシング...お休み中
(1)術具マニピュレータの研究は,執刀医と共存協調して手術を行う第3の手に注目しています.
腹壁刺入点まわりのピボット運動を直感的に理解できる新しい機構を考案して,
臓器を牽引する作用力,速度,精度,動作範囲を考慮した設計を経て試作し,
術野展開は素早いマニュアル駆動で行い,臓器の牽引は精密なモータ駆動で行える,
小型軽量で安全なマニピュレータの研究に取り組んでいます.
(2)操作インタフェースの研究は,患者の傍で手術をする医師(ヒト)の動きに注目しています.
術具を持つ手,踏ん張る脚,モニタを見る頭,などの動作を対象にヒトの動作を解析して,
非拘束なデバイスで単純かつ直感的に動作をセンシングし,
指先スイッチや脚動作のオンオフ制御,異構造マスタスレーブ制御,
ミドルウェアを介したマスタとスレーブのマルチ接続など,
術具マニピュレータをストレスなくローカル操作するインタフェースの研究に取り組んでいます.
(3)画像認識の研究は,手術で注視するモニタ内の内視鏡映像に注目しています.
臓器を牽引(カウンタートラクション)して緊張状態となった組織の形状を認識し,
鉗子やトロカーなど術具を検出して,これらを指標に執刀医のタイミングで視野を変える,
内視鏡ロボットを半自動制御する研究に取り組んでいます.
(4)外耳道から内視鏡や術具を挿入する,経外耳道的内視鏡下耳科手術のロボット支援を目指しています.
安定したクリアな視野で両手の手技を実現する,耳科向け内視鏡保持ロボットは新たな挑戦です.
狭隘空間における内視鏡の安定保持と精密動作,レンズ清掃の挿入抜去など,
異なる術式に対応するロボットの研究に取り組んでいます.
(5)力覚センシングの研究は,電気的なセンサを用いないアクチュエータ側での計測に注目しています.
ステッピングモータの脱調現象を利用して対象物の硬さを計測し,
市販の材料試験機と校正して相関を示し,計測結果を医師に分かりやすいよう提示し,
患部を診断したり,硬さに応じて把持力を調整できるマニピュレータの研究に取り組んでいます.
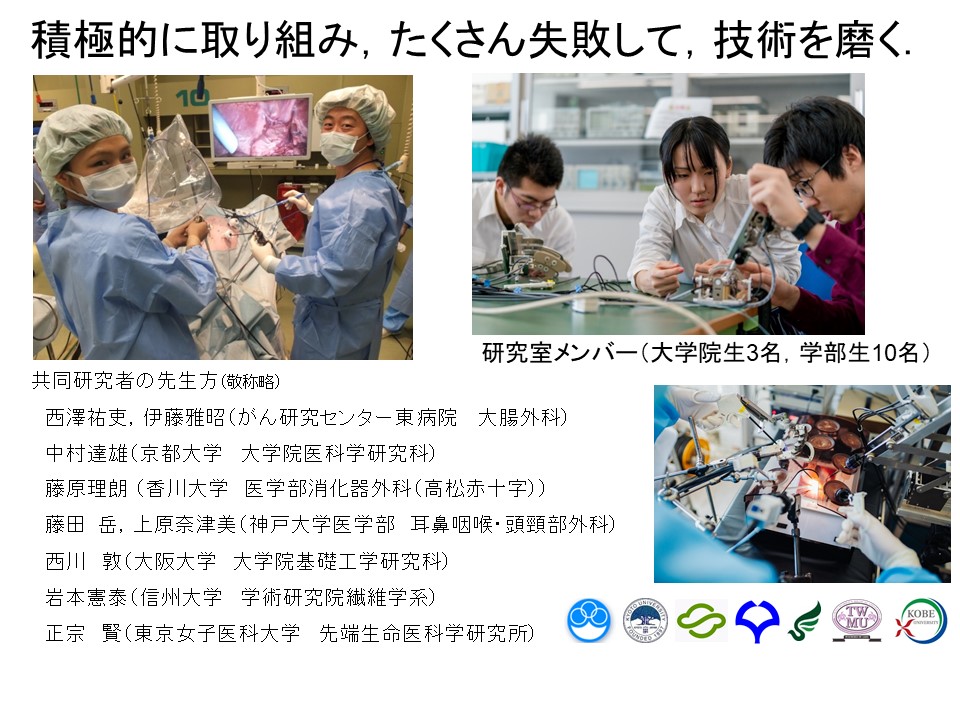
これらの研究には,学外の先生方と共同で取り組んでいます.
国立がん研究センター東病院大腸外科 西澤先生,伊藤先生
京都大学大学院医学研究科 中村先生
香川大学医学部消化器外科(高松赤十字)藤原先生
神戸大学医学部耳鼻咽喉・頭頚部外科 藤田先生,上原先生
大阪大学大学院基礎工学研究科 西川先生
信州大学学術研究院繊維学系 岩本先生
東京女子医科大学先端生命医科学研究所 正宗先生
- 研究背景 (Backgrounds) -
外科手術では機能の温存や合併症を回避するため,神経や筋肉および正常組織をできる限り残す微細作業が重要です.内視鏡外科手術は低侵襲(短い時間でかつ患部以外の正常な組織にできるだけ損傷を与えない)かつ拡大視野を得られるため,開腹開胸手術と比べて微細作業に優れていることから広く行われるようになってきています.この手術は,患者にとって創痕が小さいため整容的に優れ,身体への負担が軽く,社会復帰も早期に可能です.
しかし,外科医にとっては外径3~12mmで長さ300mmの長軸形状の術具を用いて,術具をガイドするトロカー刺入点を中心としたピボット運動による高度な手技を要求されます.すなわち,執刀医は開腹開胸手術に比べて直感的ではない操作で,自由度が少なく力覚が鈍い術具を扱い,手の振戦を抑え,さらに,内視鏡で視野を提供する助手や,鉗子で臓器を把持牽引する助手と協調する必要があります.
これら内視鏡外科手術の課題を解決すべく,執刀医のスキル向上を目指した様々なトレーニング機器が開発される一方で,ロボット技術を適用した手術支援システムへの要求が高まっています.近年,多自由度の専用術具を備える複数本のアームをマスタスレーブ制御し,手ブレ補正やモーションスケーリングと合わせて, 高精度の位置決め可能な手術支援ロボットが国内外で開発されています.このタイプのロボットは医師が患者から離れた場所で操作するリモート操作型です.医師のハイエンドツールとして,先進諸国で臨床利用されています.
- 目的 (Purpose) -
一方,患部周辺の状況を的確に把握して手技を進めることが外科手術では重要なことから,医師とロボットが清潔野で協同してスムーズな視野展開と正確な手術手技を行える内視鏡下ソロサージェリーの実現を目指し,鉗子ロボットLODEMを中心としたローカル操作型マニピュレータシステムの研究開発を進めています.本研究が実現すれば,下記の効果が期待できます.
・医師にとっては,省スタッフでの手術の提供(感染症患者と接する医療スタッフ低減),診察時間の確保,労働時間が極めて長い外科医の働き方改革,女性外科医のパワーアシスト
・患者にとっては,大規模病院に出向かずにすむ地元病院での手術(術後の通院ブランクが生じにくくがんの再発など早期発見)
・社会にとっては,診療科の偏在の縮小(離島医療など地域による医療格差の解消),診療報酬で定める手術点数の引き下げ(国民医療費の抑制),途上国への輸出
- 効果 (Benefit) -
本提案手術は,清潔野の医師一人で行え,患者の容態変化など緊急時の対応もできる安心安全な手技です(とはいえ,ワンオペは厳しいので,そこそこ賢く助手ロボットが動いてくれる自律化の研究も進めています.)
日本では都市部に比べて地方の人口が急激に減っており,外科医も地域によって偏在しています.このため,地方の病院では外科医が確保できず,高度な内視鏡外科手術ができないために身体への負担が大きい従来の開腹開胸手術を選択せざるを得ない状況になっています.離島医療では,外科医が出張して来るのを待っている状況です.本提案手術が実現することで,患者の住む場所によらず,地元の病院で内視鏡外科手術を受けることができる社会を目指しています.
また,手術スタッフの省力化に伴い,外科医は労働時間を短縮でき,診察時間の確保に繋がれば患者にも恩恵があります.医師の長時間労働を解決する一助となることを願っています.女性外科医にとっては厳しい,長時間にわたる重たい臓器の牽引を軽減できます.さらに,病院および国は手術に要する人件費を抑制できます.なお,難しい手術や研修医の教育は,これまでどおり大学病院などでスタッフを十分に配置して,遠隔操作型の手術支援ロボットなど最新機器を用いて行います.
診断機器に比べて治療機器は輸入超過であり,医療の安全保障のためにも,メイドインジャパン製品が望まれます.近接操作型のロボットデバイス群を統合する安心安全なロボット支援ソロサージェリーを構築し,医師不足の発展途上国へ輸出できれば,国際的な医療格差の縮小も期待できると考えています.